The RMS Calibration Settings dialog is part of the Tablet Calibration Wizard. The RMS Calibration Settings dialog provides information about each calibration point and the RMS error value calculated for your calibration points.
When calibration points are digitized, the coordinate positions of the points in the digitizer's grid referencing system or pixel coordinates are determined. Didger uses the selected Georeferencing Method to compute the error between the tablet or pixel coordinates and the digitized coordinates. This allows Didger to orient and scale the project.
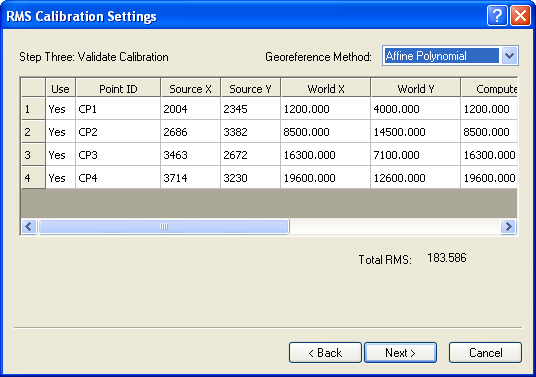
The error for each point and the total RMS error are listed in the RMS Calibration Settings dialog.
In the results grid, the following data are included. You can use the scroll bars to scroll the field of view.
The Use column shows which calibration points are used in the calibration. When set to Yes, the calibration point is used. When set to No, the calibration point is not used. Double-click on the word Yes or No to change it. As you remove calibration points, the Point Error and Total RMS values automatically update. To increase the overall accuracy of the calibration, Didger lets you exclude any points that have an unacceptably high error. Any points with a high Point Error should either be removed or recalibrated.
The Point ID column shows the name associated with each calibration point in the Create Calibration Points dialog.
The Source X and Source Y columns display the X and Y coordinates for each calibration point in the tablet coordinate system.
The World X and World Y columns display the X and Y coordinates for each calibration point in the document coordinate system.
The Computed X and Computed Y columns display the projected X and Y coordinates, in meters, for the specified latitude/longitude value for that calibration point.
The Predicted X and Predicted Y columns display the X and Y coordinates of the calibration point after it has been processed by the georeferencing algorithm. This indicates the accuracy of the calibration point for the calibration.
The Point Error column shows the standard deviation in each value. This column contains zeros if the RMS is not calculated. The error values presented for each point indicate the difference between the coordinates entered and the expected digitizing coordinates.
The Total RMS value is calculated from the Point Error values. This is a measure of the agreement between the calibration point coordinates and the expected digitizing coordinates. The Total RMS field below the results grid shows the average error that can be expected in any single point. If the RMS error is too high, click the Back button to return to the Create Calibration Points dialog and repeat the calibration procedure for any point.
Didger provides a number of methods for georeferencing the coordinate space from tablet or pixel coordinates to world coordinates. You can select one of 10 methods for calibration in the Georeference Method list, including Affine Polynomial, 1st Order Polynomial, Thin Plate Spline, Natural Cubic Spline, Marcov Spline, Exponential Spline, Rational Quadratic Spline, Inverse Distance Squared, 2nd Order Polynomial, and 3rd Order Polynomial.
When digitizing from source documents or images that contain extreme warping, a higher order polynomial method is appropriate. When different methods are selected, the Total RMS and Point Error values change.
If you do not have the minimum number of calibration points needed for a particular method, Didger defaults to the next acceptable method based the number of calibration points. For most digitizing applications, the Affine Polynomial method is the best choice.
See Also